Mesterséges intelligencia - 2. előadás
Problémamegoldás kereséssel
Letöltés PDF-ként
Ismétlés
Ágens
- szenzorokon keresztül érzékeli a környezetet
- beavatkozó szerveken keresztül cselekszik, azaz befolyásolja a környezetét
Racionális ágens
- úgy választ a lehetséges cselekvések közül, hogy általuk maximalizálja a várható hasznosságot
- egyszerű eset → rendelkezik céllal, ismeri a költségeket
- komplex eset → hasznossági függvénnyel rendelkezik, várható jutalmakat ismeri (cél a jutalom maximalizálása)
Környezet
- fontos figyelembe venni az ágens tervezésének szempontjából
- teljesen / részlegesen megfigyelhető → memória kell a belső állapot nyilvántartására
- diszkrét / folytonos → folytonosnál nem lehet az összes állapotot megkülönböztetni
- sztochasztikus / determinisztikus → több lehetséges forgatókönyvvel is kell dolgozni sztochasztikus esetben
- egyedüli ágens / több ágens → lehet, hogy véletlenszerűen kell viselkednie
Reflex ágens
- aktuális érzékelés vagy memória alapján választ cselekvést
- környezetet nyilvántarthatja memóriában (belső modell a világról)
- nem veszi figyelembe a cselekvések jövőbeli következményeit
Tervkészítő ágens
- döntéshozatalnál a lehetséges következményekkel is számol
- belső modell a világról (hogy hogyan változik a cselekvése hatására)
- kell neki egy cél, ami tesztelhető célfüggvénnyel
Keresési problémák
- keresési probléma elemei:
- állapottér
- állapotátmenet-függvény, formája: (cselekvése, költségek)
- kiindulási állapot
- célállapot teszt
- megoldás → cselekvések egy sorozata (terv), kiindulási állapotból célállapotba juttat
- Példa - Útvonaltervezés
- állapottér → városok
- állapotátmenet-függvény → utak, költség a távolság
- kiindulási állapot → pl Arad
- célállapot tesztelés → állapot == Bukarest?
- állapottér nagysága → könnyen túl nagy lehet
- elég csak a nagy valószínűséggel bekövetkező lehetőségeket számba venni
Keresési eljárás tulajdonságai
- Teljesség (completeness) → ha van megoldás, biztosan megtalálja
- Időigény (time complexity) → mennyi idő a megoldás megtalálása
- Tárigény (space complexity) → mennyi tárhely kell
- Optimalitás (optimality) → ha több megoldás van, megtaláltuk e a legjobbat?
Állapottér reprezentáció
Állapottérgráf
- csomópontok a világ állapotának egy egy absztrakt reprezentációi
- élek → állapot átmenetek
- célteszt → célállapot elérésének vizsgálata
- minden állapot 1x fordulhat elő
- probléma: nagyon nagy lesz, teljes egészében nem lesz felépíthető a memóriában
Keresési fa
- start: gyökér csomópont
- levelek: lehetséges jövők
- csomópontok → olyan állapot, amit tartalmaz egy adott terv
- probléma: teljes egészében nem lesz felépíthető a memóriában
Állapottérgráf vs keresési fa
- keresési fa 1 csomópontja = egy útvonal az állapottérgráfban
- kört tartalmazó állapottérgráfhoz → végtelen fa kellene!
Keresés keresési fával (általánosan)
- perem = potenciális terv folytatások
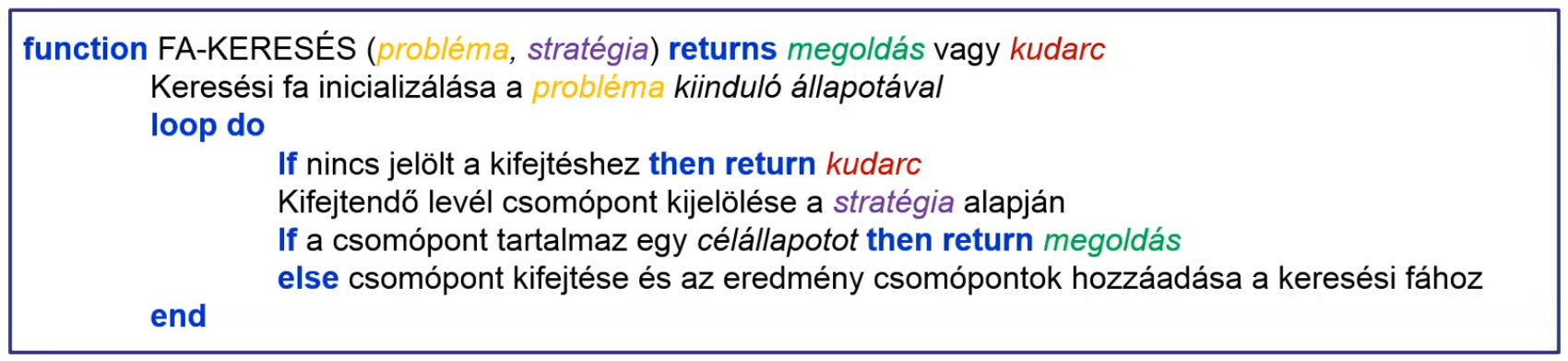
- a különböző algoritmusok a stratégiában fognak különbözni, amivel a következő vizsgált perem pont lesz kijelölve
Keresési stratégiák
- nem informált keresések (gyenge, vak keresés)
- tudjuk: hogyan néz ki a célállapot
- nem tudjuk: merre a cél, milyen költségű oda a legrövidebb út
- informált keresések (heurisztikus keresések)
- tudjuk: hogyan néz ki a célállapot
- jó becslésünk van rá: merre lehet a célállapot, milyen költségű a célállapotba vezető út
Mélységi keresés (DFS)
- stratégia: legmélyebb csomópont kifejtése (legbaloldalibb ág a fában)
- megvalósítás: a perem egy LIFO stack
- legrosszabb eset → teljes fa feldolgozása
- elágazási faktor = b (egy szinten hány gyerek van)
- maximum mélység = m
- jellemzése:
- Teljesség → bal oldallel kezd, teljes fát is feldolgozhatja
- feltétel: m legyen véges → O(bm) időt vesz igénybe
- Időkomplexitás
- Tárkomplexitás → csak a gyökércsomóponthoz vezető úton levő elágazások számítanak → O(bm) :)
- Optimalitás → nem, legbaloldalibb megoldást találja meg, költségtől és mélységtől függetlenül :(
- baj: ha jobb oldalt van a megoldás
Szélességi keresés (BFS)
- strarégia: a legkevésbé mélyen levő csomópont kifejtése (szintenként)
- megvalósítás: a perem egy FIFO sor
- jelenlegi mélység = s
- jellemzése:
- Teljesség → legfelső szinttel kezd, teljes fát is feldolgozhatja (s véges, ha létezik megoldás)
- feltétel: O(bs) időt vesz igénybe
- Időkomplexitás
- Tárkomplexitás → kb a legutolsó szinttel arányos: O(bs) :(
- Optimalitás → igen, ha minden egységesen 1 költségű :)
- baj: ha mélyen van a megoldás
Mélységkorlátozott keresés
- utak maximális mélységére (m) vágási korlátot ad
- ha ezt eléri a keresés, akkor visszalép
- Teljesség → ha a vágás felett van a megoldás (ha nem, akkor gáz van)
- Optimalitás → nem optimális (nem garantálja a legkisebb költségű utat)
- baj: honnan tudjuk a korlátot?
Iteratívan mélyülő keresés
- ötlet: jó ez a mélységkorlátozós dolog, de nehéz belőni a jó korlátot
- megoldás: kipróbáljuk az összes lehetséges mélységkorlátot
- baj: redundáns lesz, olyat kell feldolgozni amit már egyszer feldolgoztunk
- Optimális és teljes → mint a szélességi keresésé
- Tárhelykomplexitása alacsony → mint a mélységi keresésé
- kifejtések száma, ha d mélységben b elágazási tényező mellett
- szélességi keresésnél → 1 + b + b2 + ... + bd-2 + bd-1 + bd
- iteratívan mélyülő keresésnél → (d+1)*1 + (d)*b + (d-1)b2 + ... 3bd-2 + 2bd-1 + 1bd
- mivel a fa felsőbb részeit többször kifejti
- minél nagyobb az elágazási tényező, annál kisebb lesz a többletmunka
Költségérzékeny keresés
Egyenletes költségű keresés (UCS)
- stratégia: legkisebb költségű csomópont kifejtése
- módszer: perem egy prioritásos sor lesz, ahol a prioritás a kumulált költségnek felel meg
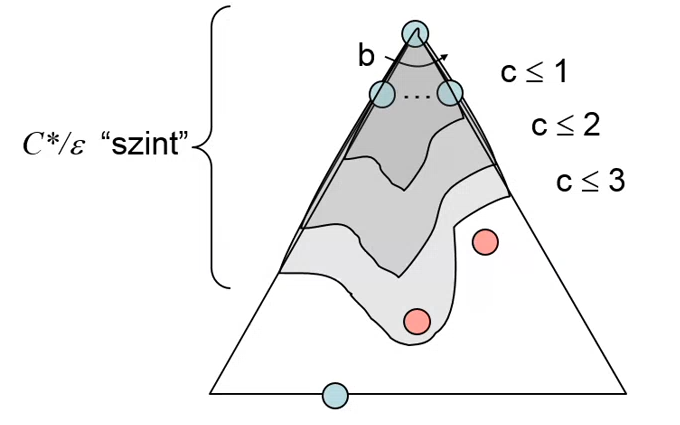
- elv: kifejti az összes olyan csomópontot, ami kevesebb költséggel elérhető, mint a legkisebb költségű megoldás
- C* = megoldás költsége, ε = élek legalább ε költségűek (minimum élköltség)
- effektív mélység = C*/ε
- Teljesség → igen, ha a legjobb megoldás véges költségű és a minimum élköltség pozitív!
- Optimális → IGEN :)
- Tárhelykomplexitás → kb az utolsó szinttel arányos O(bC*/ε)
- Időkomplexitás → O(bC*/ε)
- baj: minden irányba feltár, fogalma sincs a célállapot helyzetéről
Eddigi algoritmusok közös tulajdonságia
- Csak a perem tárolásának módjában különböznek
- mind valamilyen prioritásos sort használnak
- mélységi → verem
- szélességi → sor
Kétirányú keresés
- egyszerre indítunk keresést előre a kiinduló állapotból és hátra a célállapotból
- keresés véget ér, ha találkozik a két keresés
- implementálása nem triviális
- hogy keresünk hátrafele? → több célállapot esetén nehéz
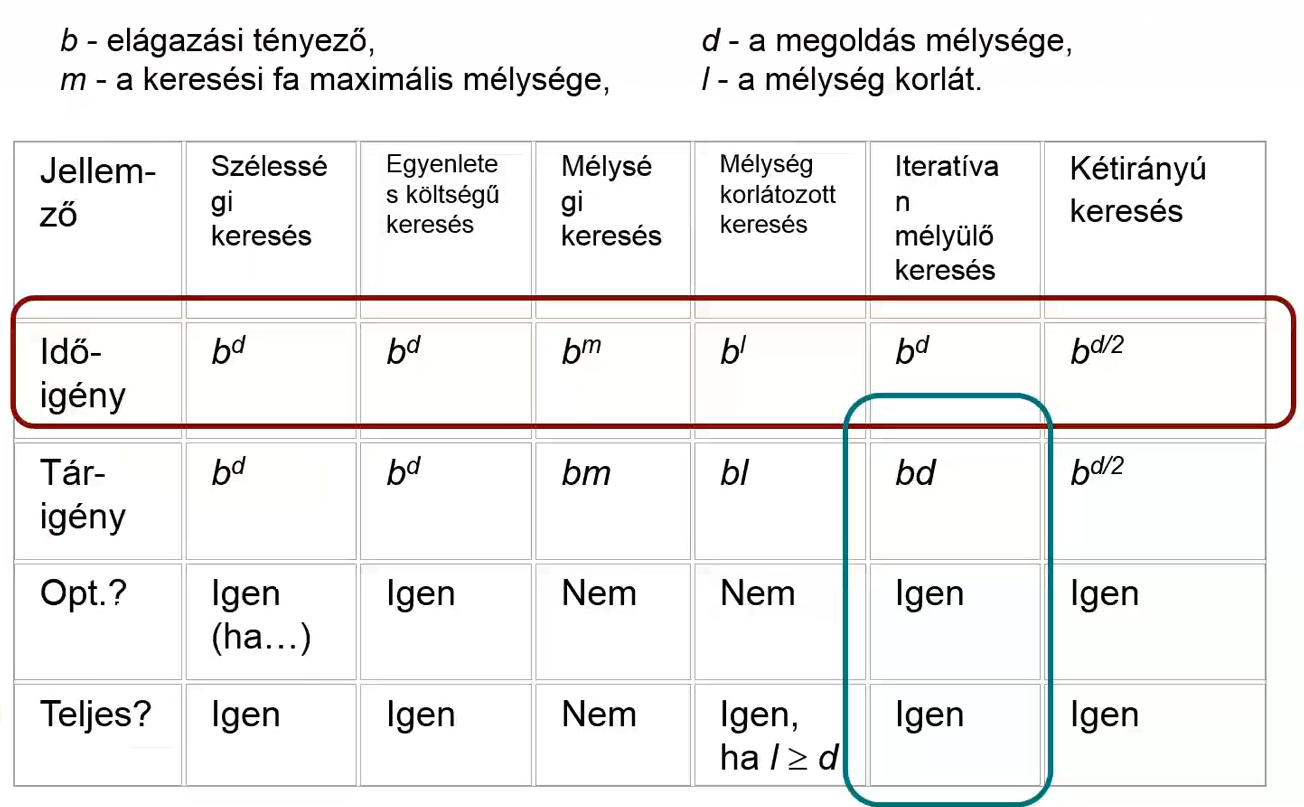
Eddigi keresések összefoglalója
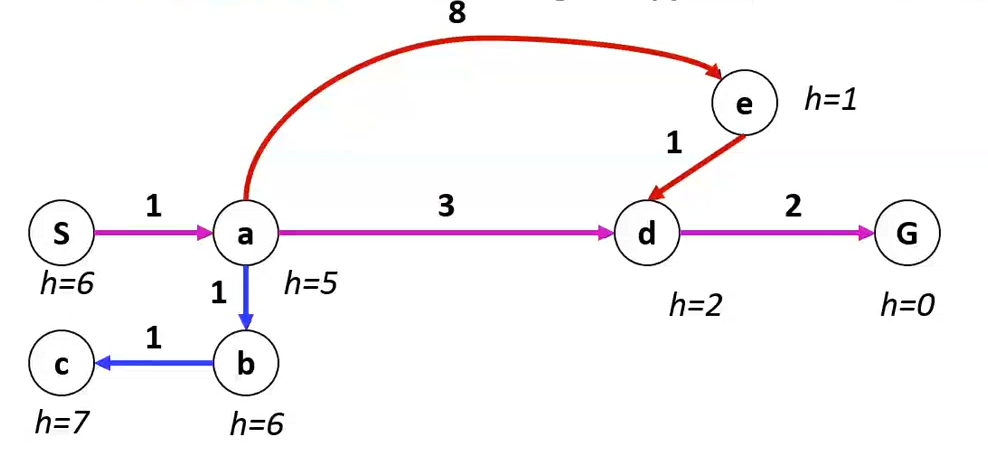
Heurisztika, h(n)
- ötlet: büntessük, ha a céltól távolodunk = jutalmazzuk, ha közeledünk
- egy függvény, ami becslést ad arra, hogy az adott állapot mennyire van közel a célállapothoz
- mindig az adott keresési problémához tervezett (pl: Manhattan távolság, euklidészi távolság)
- minden n állapotra ki kell számítani
- ha teljesen pontos lenne, akkor felesleges (egyértelmű a megoldás)
- teljes útköltség = eddig megtett út költsége + hátralevő út költsége → f(n) = g(n) + h(n)
Mohó keresés
- stratégia: fejtsük ki azt a csomópontot, amiről azt gondoljuk, hogy a legközelebb van a célállapothoz
- heurisztika: a legközelebbi célállapottól való becsült távolság
- probléma: nem biztos, hogy az aktuálisan legjobb állapot lesz a legjobb globálisan
- legrosszabb esetben egy rosszul irányított mélységi keresést kapunk
- Teljesség → nem teljes (elindul végtelen úton, nem tér vissza mást kipróbálni)
- Optimális → nem optimális
- Idő és Tárigény → nagyon rossz, az összes csomópontot a memóriában tartja → O(bm)
A* keresés
- ötlet: egyenletes költségű és mohó keresést kombináljuk
- egyenletes költségű → g(n) minimalizálása a célja
- mohó → h(n) minimalizálása a célja
- vegyük figyelembe az eddig megtett út költségét és a hátralevő út költségét is → f(n) = g(n) + h(n)
- csak akkor állhatunk meg, ha már kifejtésre került a célállapot (nem elég, ha a kifejtendők közt van, mert az utolsó út is számít)
- Teljes és Optimális → igen, ha jó a heurisztika
- A határvonala a cél fele van (az egyenletes költségűé egyenletes minden irányba)
Elfogadható heurisztika
- nem elfogadható (pesszimista) heurisztika megtöri az optimalitást azzal, hogy jó tervek a peremben maradnak
- elfogadható (optimista) heurisztika "lelassítja" a rossz terveket, de sosem lép túl a valós költségeken
- 0 ≤ h(n) ≤ h*(n), ahol h*(n) a valós költség a legközelebbi célállapothoz
- A* kereséshez elengedhetetlen az elfogadható heurisztika kialakítása!
- heurisztika készítése → probléma relaxálásával (egyszerűsítésével) → pl légvonal, manhattan távolság stb